
Данное предложение не является публичной офертой и носит рекомендательный характер с целью подбора оптимальной комплектации оборудования. Комплектация оборудования может изменяться в соответствие с запросом Заказчика. Стоимость и состав предложения могут изменяться в соответствие с предложением Поставщика. Срок и условия поставки определяются индивидуально в зависимости от комплектации и количества запрашиваемого оборудования.

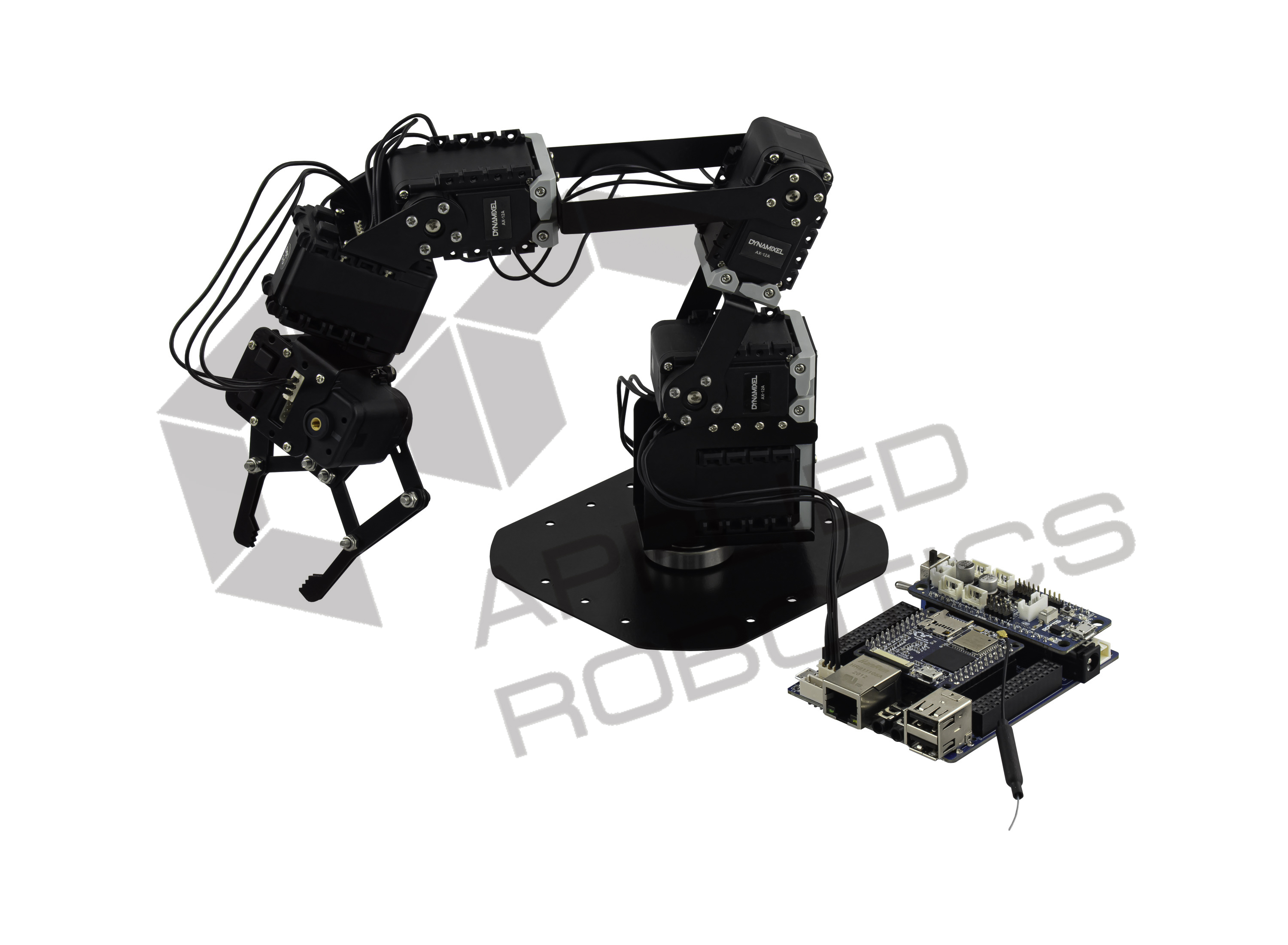
Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов «Образовательный робототехнический комплект «СТЕМ Мастерская». Экспертный набор» предназначен для изучения основ разработки и конструирования моделей промышленных манипуляционных роботов различного типа и автономных мобильных роботов. В состав комплекта входят сервомодули, представляющие собой модели промышленных автоматизированных приводов со встроенной системой управления. Применение данного типа сервомодулей позволяет разрабатывать модели манипуляционных роботов с различными типами кинематической схемы, обладающих высокой точностью и динамикой движения.
Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов «Образовательный робототехнический комплект «СТЕМ Мастерская». Экспертный набор» позволит учащимся на примере собираемых из набора манипуляционных роботов ознакомиться с основными технологическими принципами, применяемыми на современном производстве, и научиться выполнять различные технологические операции с использованием ручных инструментов и специализированного оборудования. Путем использования данного комплекта в проектной деятельности и работе в команде, учащиеся изучат виды технологических операций на производстве, основы проектирования гибких производственных ячеек и разработки систем управления манипуляционными роботами. Также они узнают об инженерных профессиях и специальностях, необходимых на современном производстве и в Индустрии 4.0.

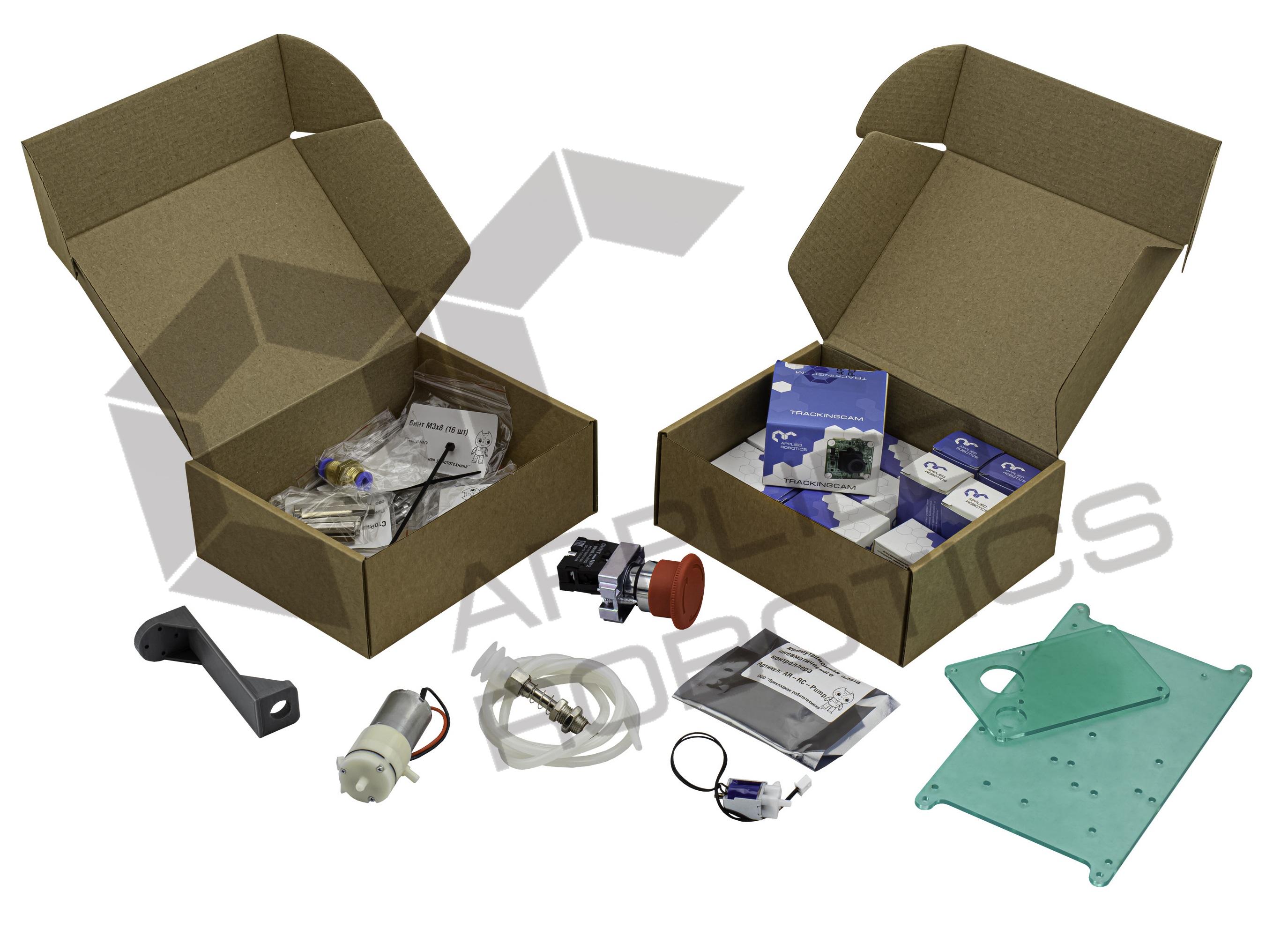
Комплектация
- Конструктивные элементы из металла для сборки модели манипуляционного робота с угловой кинематикой, 23 шт
- Конструктивные элементы из металла для сборки модели манипуляционного робота с плоско-параллельной кинематикой, 30 шт
- Конструктивные элементы из металла для сборки модели манипуляционного робота с DELTA кинематикой, 10 шт
- Крепежные элементы (винты различного номинала и длины), 64 шт
- Крепежные элементы (гайки различного номинала), 64 шт
- Элементы для создания шарнирных соединений, 7 шт
- Соединительные кабели различной длины, 7 шт
- Интеллектуальный сервомодуль с интегрированной системой управления, 7 шт
Сервомодуль представляет собой единый электромеханический модуль, включающий в себя привод на базе двигателя постоянного тока, понижающий редуктор, встроенную систему управления. Сервомодуль обладает интегрированной системой управления, обеспечивающей обратную связь, контроль параметров — положение вала, скорость вращения, нагрузка привода, а также обеспечивающей возможность последовательного подключения друг с другом и управления сервомодулями по последовательному полудуплексному асинхронному интерфейсу. Имеется режим постоянного вращения выходного вала.
Технические характеристики привода:
Нижняя граница диапазона допустимого напряжения питания — 9 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Передаточное отношение редуктора — 254. Максимальный момент — 1,5 Н*м. Нижняя граница диапазона номинальной скорости вращения в режиме постоянного вращения — 0 об/мин. Верхняя граница диапазона номинальной скорости вращения в режиме постоянного вращения — 59 об/мин. Максимальная величина угла поворота в режиме позиционного управления — 300 угловых градусов. Разрешающая способность — 0,29 угловых градусов. Размеры сервомодуля (ДхШхВ) — 32х50х40 мм. - Робототехнический контроллер, 1 шт
Робототехнический контроллер представляет собой модульное устройство, включающее в себя одноплатный микрокомпьютер для выполнения сложных вычислительных операций, периферийный контроллер для управления внешними устройствами и плату расширения для подключения внешних устройств. Модули робототехнического контроллера обладают одновременной конструктивной, аппаратной и программной совместимостью друг с другом. Имеется конструктивная, интерфейсная и электрическая совместимость робототехнического контроллера с опционально встраиваемым внешним микрокомпьютером.
Робототехнический контроллер обеспечивает возможность программирования с помощью средств языков С/С++, Python и свободно распространяемой среды Arduino IDE, а также управления моделями робототехнических систем с помощью среды ROS. Количество портов для подключения опционально встраиваемого внешнего микрокомпьютера — 48 шт. Имеется встроенный опциональный микрокомпьютер.
Технические характеристики робототехнического контроллера:
Нижняя граница диапазона питания внешней аккумуляторной батареи — 6,8 В. Верхняя граница диапазона питания внешней аккумуляторной батареи — 12 В. Порты для подключения внешних цифровых устройств — 16 шт. Порты для подключения внешних аналоговых устройств — 10 шт. Интерфейс 1-wire TTL для подключения по последовательному интерфейсу — 1 шт. Кол-во портов тип 4pin для подключения сервомодулей по последовательному интерфейсу — 2 шт. Программируемые кнопки — 1 шт. Интерфейс PWM — 1 шт. Интерфейс UART — 4 шт. Интерфейс I2C — 2 шт. Интерфейс SPI — 2 шт. Интерфейс для подключения микрофона — 1 шт. Интерфейс для подключения динамиков — 1 шт.
Технические характеристики встроенного опционального микрокомпьютера:
Количество вычислительных процессорных ядер — 4 шт. Оперативная память — 512 МБайт. Имеется встроенные интерфейсы WiFi и Bluetooth. Количество слотов для подключения карты памяти microSD — 1 шт. Встроенный микрофон — 1 шт.
- Комплект для сборки пневмосистемы, 1 шт
Конструктивные элементы из пластика для сборки каркаса пневмосистемы — 2 шт. Крепежные элементы (винты, гайки, стойки, стяжки) — 30 шт. Коммутационные кабели (тип «Папа-Папа» и «Папа-Мама») — 10 шт. Коммутационная плата пневмосистемы, 1 шт.
Технические характеристики коммутационной платы пневмосистемы:
Количество линий +5В — 2 шт. Количество линий 0В — 2 шт. Количество выводов для коммутации силовой нагрузки с прямым управлением — 2 шт. Количество линий управления силовой нагрузкой — 2 шт. Количество индикаторов — 3 шт. Габариты — 43х33х12 мм.
Комплект вакуумного захвата — 1 шт. Технические характеристики комплекта вакуумного захвата:
Тип захвата — вакуумная присоска. Вакуумная присоска — 1 шт. Электромагнитный клапан — 1 шт. Вакуумный насос — 1 шт. Виниловая трубка — 1 м.
Напряжение питания — 5 В. Кнопочный выключатель с фиксацией — 1 шт. Коммутационный пневмосоединитель — 1 шт. - Универсальный вычислительный модуль, 1 шт
Универсальный вычислительный модуль представляет собой микропроцессорное устройство, предназначенное для управления устройствами, входящими в состав образовательного робототехнического комплекта. Имеется возможность подключения сервомодулей по последовательному интерфейсу. Интерфейс 1-wire TTL для подключения по последовательному интерфейсу — 1 шт. Размеры (ДхШ) — 40х40 мм. Нижняя граница диапазона допустимого напряжения питания — 5 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Объем Flash памяти — 256 Кбайт. Тактовая частота процессора — 16 МГц. Кол-во портов тип USB — 2 шт. Кол-во цифровых портов «Ввода-Вывода» — 12 шт. Кол-во аналоговых портов — 16 шт. Интерфейс UART — 1 шт. Интерфейс I2C — 1 шт. Интерфейс SPI — 1 шт. Линия питания «+12В» — 1 шт. Линия питания «+5В» — 1 шт. Линия питания «+3,3В» — 1 шт. Линия питания «Земля» — 1 шт. Светодиодный индикатор — 1 шт. Имеется беспроводной интерфейс WiFi и беспроводной интерфейс Bluetooth. Переключатель — 1 шт. Кнопка — 3 шт. - Плата расширения универсального вычислительного модуля, 1 шт
Плата расширения обеспечивает возможность подключения универсального вычислительного модуля к сети посредством интерфейса Ethernet. Габариты (ДхШ) — 40х40 мм. Напряжение питания — 5 В. Кол-во портов «Ввода-Вывода» — 40 шт. Интерфейс Ethernet — 1 шт. Интерфейс SPI — 1 шт. Интерфейс подключения карты microSD — 1 шт. Светодиодный индикатор — 4 шт. Кнопка — 1 шт. - Модуль технического зрения, 1 шт
Модуль технического зрения представляет собой вычислительное устройство со встроенным микроконтроллером, интегрированной телекамерой и оптической системой. Имеется возможность коммуникации с аналогичными модулями посредством шины на базе последовательного интерфейса с целью дальнейшей передачи результатов измерений группы модулей на управляющее вычислительное устройство, подключенное к данной шине. Встроенное программное обеспечение позволяет осуществлять настройку модуля технического зрения — настройку экспозиции, баланса белого, цветоразностных составляющих, площади обнаруживаемой области изображения, округлости обнаруживаемой области изображения, положение обнаруживаемых областей относительно друг друга.
Технические характеристики модуля технического зрения:
Размеры модуля (ДхШхВ) — 38х38х32 мм. Интерфейс USB для настройки модуля — 1 шт. Разрешение видеопотока, передаваемого по интерфейсу USB — 640х480 пикселей. Кол-во градаций цветовой палитры — 65536. Кол-во различных объектов, обнаруживаемых одновременно в секторе обзора модуля — 10 шт. Порт питания +5В — 2 шт. Порт тип GND «земля» — 2 шт. Интерфейс UART — 1 шт. Интерфейс I2C — 1 шт. Интерфейс SPI — 1 шт. Коммуникационный интерфейс 1-wire TTL для связи по последовательной шине — 1 шт. - Адаптер питания от сети 220 В, 1 шт.
- Сетевой кабель адаптера питания, 1 шт.
- USB интерфейсный кабель для программирования программируемого контроллера, 1 шт.
- Модуль тактовой кнопки, 3 шт
Размеры (ДхШ) — 12х12 мм. Интерфейсный разъем тип RJ14 — 1 шт. Интерфейс 1-wire TTL — 1 шт. Штыревой интерфейсный разъем — 1 шт. Количество линий штыревого интерфейсного разъема — 6 шт. Имеются цифровые и аналоговые порты. Имеется встроенный вычислительный микроконтроллер. Тактовая частота микроконтроллера — 16 МГц. Объем памяти, доступной по шине данных микроконтроллера — 8 КБайт. Нижняя граница диапазона допустимого напряжения питания — 5 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Размеры (ДхШ) — 40х26 мм. - Модуль светодиода, 3 шт
Размеры светодиода (ДхШ) — 3,5х2,8 мм. Интерфейсный разъем тип RJ14 — 1 шт. Интерфейс 1-wire TTL — 1 шт. Штыревой интерфейсный разъем — 1 шт. Количество линий штыревого интерфейсного разъема — 6 шт. Имеются цифровые и аналоговые порты. Имеется встроенный вычислительный микроконтроллер. Тактовая частота микроконтроллера — 16 МГц. Объем памяти, доступной по шине данных микроконтроллера — 8 КБайт. Нижняя граница диапазона допустимого напряжения питания — 5 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Размеры модуля (ДхШ) — 40х26 мм. - Модуль концевого прерывателя, 3 шт
Интерфейсный разъем тип RJ14 — 1 шт. Интерфейс 1-wire TTL — 1 шт. Штыревой интерфейсный разъем — 1 шт. Количество линий штыревого интерфейсного разъема — 6 шт. Имеются цифровые и аналоговые порты. Имеется встроенный вычислительный микроконтроллер. Тактовая частота микроконтроллера — 16 МГц. Объем памяти, доступной по шине данных микроконтроллера — 8 КБайт. Нижняя граница диапазона допустимого напряжения питания — 5 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Размеры (ДхШ) — 40х26 мм. - Модуль датчика цвета, 1 шт.
Количество цветовых каналов — 3 шт. Интерфейсный разъем тип RJ14 — 1 шт. Интерфейс 1-wire TTL — 1 шт. Штыревой интерфейсный разъем — 1 шт. Количество линий штыревого интерфейсного разъема — 6 шт. Имеются цифровые и аналоговые порты. Имеется встроенный вычислительный микроконтроллер. Тактовая частота микроконтроллера — 16 МГц. Объем памяти, доступной по шине данных микроконтроллера — 8 КБайт. Нижняя граница диапазона допустимого напряжения питания — 5 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Размеры (ДхШ) — 40х26 мм. - Модуль RGB светодиода, 3 шт.
Количество цветовых каналов — 3 шт. Интерфейсный разъем тип RJ14 — 1 шт. Интерфейс 1-wire TTL — 1 шт. Штыревой интерфейсный разъем — 1 шт. Количество линий штыревого интерфейсного разъема — 6 шт. Имеются цифровые и аналоговые порты. Имеется встроенный вычислительный микроконтроллер. Тактовая частота микроконтроллера — 16 МГц. Объем памяти, доступной по шине данных микроконтроллера — 8 КБайт. Нижняя граница диапазона допустимого напряжения питания — 5 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Размеры (ДхШ) — 40х26 мм. - Программное обеспечение для визуализации 3D моделей манипуляционного робота
Программное обеспечение обеспечивает трехмерную визуализацию модели манипуляционного робота (с угловой, плоскопараллельной и дельта-кинематикой) в процессе работы, обеспечивать построение пространственной траектории движения исполнительного механизма манипуляционного робота, возможность задания последовательности точек для прохождения через них исполнительного механизма манипуляционного робота. Программное обеспечение функционирует, как в отдельности в виде среды моделирования, так и в режиме мониторинга в реальном времени при подключении модели манипулятора посредством робототехнического контроллера. Программное обеспечение обеспечивает возможность построения графиков заданных и текущих обобщенных координат манипуляционного робота, графиков значений скоростей и ускорения, графиков расчетных значений нагрузки. Программное обеспечение позволяет задавать последовательность передвижений манипулятора посредством набора команд в блочно-графическом интерфейсе. - Учебное пособие на русском языке, 2 шт

В состав набора входит учебный комплект, включающий в себя учебное пособие, набор библиотек трехмерных элементов для прототипирования моделей манипуляционных роботов, а также программное обеспечение для работы с набором. Учебное пособие содержит материалы по разработке трехмерных моделей мобильных роботов, манипуляционных роботов с различными типами кинематики (угловая кинематика, плоско-параллельная кинематика, дельта-кинематика, SCARA (рычажная кинематика), платформа Стюарта), инструкции по проектированию роботов, инструкции и методики осуществления инженерных расчетов при проектировании (расчеты нагрузки и моментов, расчет мощности приводов, расчет параметров кинематики), инструкции по разработке систем управления и программного обеспечения для управления роботами, инструкции и методики по разработке систем управления с элементами искусственного интеллекта и машинного обучения.
На начальном этапе учащиеся могут разрабатывать модели роботов и программировать их с использованием блочно-графической среды программирования.
На среднем этапе учащиеся могут программировать модели роботов с использованием среды программирования Arduino IDE, используя отечественный робототехнический контроллер.
В рамках начального и среднего этапа учащиеся могут применять аддитивные технологии в процессе разработки и изготовления конструкции робота. Начиная с начального этапа, учащиеся могут также разрабатывать модели автономных роботов с использованием различных сенсорных устройств, в том числе систем технического зрения на базе отечественного модуля.
В рамках старшего этапа учащиеся могут расширить функционал программируемого контроллера за счет установки модуля расширения на базе микрокомпьютера с ОС Linux. Благодаря этому появляется возможность изучать основы разработки робототехнических систем с системами управления на базе ОС реального времени или типа Linux, а также изучать методы сбора и анализа визуальной информации, принципы дистанционного управления и интеграции робототехнических комплексов в системы типа Индустрия 4.0 и Интернет Вещей.
Для данного товара еще нет отзывов, ваш отзыв может стать первым!
Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов «Образовательный робототехнический комплект «СТЕМ Мастерская». Расширенный» предназначен для изучения основ разработки и конструирования моделей промышленных манипуляционных роботов различного типа и автономных мобильных роботов. В состав комплекта входят сервомодули, представляющие собой модели промышленных автоматизированных приводов со встроенной системой управления. Применение данного типа сервомодулей позволяет разрабатывать модели манипуляционных роботов с различными типами кинематической схемы, обладающих высокой точностью и динамикой движения.
Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов «Образовательный робототехнический комплект «СТЕМ Мастерская». Расширенный» позволит учащимся на примере собираемых из набора манипуляционных роботов ознакомиться с основными технологическими принципами, применяемыми на современном производстве, и научиться выполнять различные технологические операции с использованием ручных инструментов и специализированного оборудования. Путем использования данного комплекта в проектной деятельности и работе в команде, учащиеся изучат виды технологических операций на производстве, основы проектирования гибких производственных ячеек и разработки систем управления манипуляционными роботами. Также они узнают об инженерных профессиях и специальностях, необходимых на современном производстве и в Индустрии 4.0.
Комплектация
- Конструктивные элементы из металла для сборки модели манипуляционного робота с угловой кинематикой, 23 шт
- Конструктивные элементы из металла для сборки модели манипуляционного робота с плоско-параллельной кинематикой, 30 шт
- Конструктивные элементы из металла для сборки модели манипуляционного робота с DELTA кинематикой, 10 шт
- Крепежные элементы (винты различного номинала и длины), 64 шт
- Крепежные элементы (гайки различного номинала), 64 шт
- Элементы для создания шарнирных соединений, 7 шт
- Соединительные кабели различной длины, 7 шт
- Интеллектуальный сервомодуль с интегрированной системой управления, 7 шт
Сервомодуль представляет собой единый электромеханический модуль, включающий в себя привод на базе двигателя постоянного тока, понижающий редуктор, встроенную систему управления. Сервомодуль обладает интегрированной системой управления, обеспечивающей обратную связь, контроль параметров — положение вала, скорость вращения, нагрузка привода, а также обеспечивающей возможность последовательного подключения друг с другом и управления сервомодулями по последовательному полудуплексному асинхронному интерфейсу. Имеется режим постоянного вращения выходного вала.
Технические характеристики привода:
Нижняя граница диапазона допустимого напряжения питания — 9 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Передаточное отношение редуктора — 254. Максимальный момент — 1,5 Н*м. Нижняя граница диапазона номинальной скорости вращения в режиме постоянного вращения — 0 об/мин. Верхняя граница диапазона номинальной скорости вращения в режиме постоянного вращения — 59 об/мин. Максимальная величина угла поворота в режиме позиционного управления — 300 угловых градусов. Разрешающая способность — 0,29 угловых градусов. Размеры сервомодуля (ДхШхВ) — 32х50х40 мм. - Робототехнический контроллер, 1 шт
Робототехнический контроллер представляет собой модульное устройство, включающее в себя одноплатный микрокомпьютер для выполнения сложных вычислительных операций, периферийный контроллер для управления внешними устройствами и плату расширения для подключения внешних устройств. Модули робототехнического контроллера обладают одновременной конструктивной, аппаратной и программной совместимостью друг с другом. Имеется конструктивная, интерфейсная и электрическая совместимость робототехнического контроллера с опционально встраиваемым внешним микрокомпьютером.
Робототехнический контроллер обеспечивает возможность программирования с помощью средств языков С/С++, Python и свободно распространяемой среды Arduino IDE, а также управления моделями робототехнических систем с помощью среды ROS. Количество портов для подключения опционально встраиваемого внешнего микрокомпьютера — 48 шт. Имеется встроенный опциональный микрокомпьютер.
Технические характеристики робототехнического контроллера:
Нижняя граница диапазона питания внешней аккумуляторной батареи — 6,8 В. Верхняя граница диапазона питания внешней аккумуляторной батареи — 12 В. Порты для подключения внешних цифровых устройств — 16 шт. Порты для подключения внешних аналоговых устройств — 10 шт. Интерфейс 1-wire TTL для подключения по последовательному интерфейсу — 1 шт. Кол-во портов тип 4pin для подключения сервомодулей по последовательному интерфейсу — 2 шт. Программируемые кнопки — 1 шт. Интерфейс PWM — 1 шт. Интерфейс UART — 4 шт. Интерфейс I2C — 2 шт. Интерфейс SPI — 2 шт. Интерфейс для подключения микрофона — 1 шт. Интерфейс для подключения динамиков — 1 шт.
Технические характеристики встроенного опционального микрокомпьютера:
Количество вычислительных процессорных ядер — 4 шт. Оперативная память — 512 МБайт. Имеется встроенные интерфейсы WiFi и Bluetooth. Количество слотов для подключения карты памяти microSD — 1 шт. Встроенный микрофон — 1 шт.
- Комплект для сборки пневмосистемы, 1 шт
Конструктивные элементы из пластика для сборки каркаса пневмосистемы — 2 шт. Крепежные элементы (винты, гайки, стойки, стяжки) — 30 шт. Коммутационные кабели (тип «Папа-Папа» и «Папа-Мама») — 10 шт. Коммутационная плата пневмосистемы, 1 шт.
Технические характеристики коммутационной платы пневмосистемы:
Количество линий +5В — 2 шт. Количество линий 0В — 2 шт. Количество выводов для коммутации силовой нагрузки с прямым управлением — 2 шт. Количество линий управления силовой нагрузкой — 2 шт. Количество индикаторов — 3 шт. Габариты — 43х33х12 мм.
Комплект вакуумного захвата — 1 шт. Технические характеристики комплекта вакуумного захвата:
Тип захвата — вакуумная присоска. Вакуумная присоска — 1 шт. Электромагнитный клапан — 1 шт. Вакуумный насос — 1 шт. Виниловая трубка — 1 м.
Напряжение питания — 5 В. Кнопочный выключатель с фиксацией — 1 шт. Коммутационный пневмосоединитель — 1 шт. - Универсальный вычислительный модуль, 1 шт
Универсальный вычислительный модуль представляет собой микропроцессорное устройство, предназначенное для управления устройствами, входящими в состав образовательного робототехнического комплекта. Имеется возможность подключения сервомодулей по последовательному интерфейсу. Интерфейс 1-wire TTL для подключения по последовательному интерфейсу — 1 шт. Размеры (ДхШ) — 40х40 мм. Нижняя граница диапазона допустимого напряжения питания — 5 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Объем Flash памяти — 256 Кбайт. Тактовая частота процессора — 16 МГц. Кол-во портов тип USB — 2 шт. Кол-во цифровых портов «Ввода-Вывода» — 12 шт. Кол-во аналоговых портов — 16 шт. Интерфейс UART — 1 шт. Интерфейс I2C — 1 шт. Интерфейс SPI — 1 шт. Линия питания «+12В» — 1 шт. Линия питания «+5В» — 1 шт. Линия питания «+3,3В» — 1 шт. Линия питания «Земля» — 1 шт. Светодиодный индикатор — 1 шт. Имеется беспроводной интерфейс WiFi и беспроводной интерфейс Bluetooth. Переключатель — 1 шт. Кнопка — 3 шт. - Плата расширения универсального вычислительного модуля, 1 шт
Плата расширения обеспечивает возможность подключения универсального вычислительного модуля к сети посредством интерфейса Ethernet. Габариты (ДхШ) — 40х40 мм. Напряжение питания — 5 В. Кол-во портов «Ввода-Вывода» — 40 шт. Интерфейс Ethernet — 1 шт. Интерфейс SPI — 1 шт. Интерфейс подключения карты microSD — 1 шт. Светодиодный индикатор — 4 шт. Кнопка — 1 шт. - Модуль технического зрения, 1 шт
Модуль технического зрения представляет собой вычислительное устройство со встроенным микроконтроллером, интегрированной телекамерой и оптической системой. Имеется возможность коммуникации с аналогичными модулями посредством шины на базе последовательного интерфейса с целью дальнейшей передачи результатов измерений группы модулей на управляющее вычислительное устройство, подключенное к данной шине. Встроенное программное обеспечение позволяет осуществлять настройку модуля технического зрения — настройку экспозиции, баланса белого, цветоразностных составляющих, площади обнаруживаемой области изображения, округлости обнаруживаемой области изображения, положение обнаруживаемых областей относительно друг друга.
Технические характеристики модуля технического зрения:
Размеры модуля (ДхШхВ) — 38х38х32 мм. Интерфейс USB для настройки модуля — 1 шт. Разрешение видеопотока, передаваемого по интерфейсу USB — 640х480 пикселей. Кол-во градаций цветовой палитры — 65536. Кол-во различных объектов, обнаруживаемых одновременно в секторе обзора модуля — 10 шт. Порт питания +5В — 2 шт. Порт тип GND «земля» — 2 шт. Интерфейс UART — 1 шт. Интерфейс I2C — 1 шт. Интерфейс SPI — 1 шт. Коммуникационный интерфейс 1-wire TTL для связи по последовательной шине — 1 шт. - Адаптер питания от сети 220 В, 1 шт.
- Сетевой кабель адаптера питания, 1 шт.
- USB интерфейсный кабель для программирования программируемого контроллера, 1 шт.
- Модуль тактовой кнопки, 3 шт
Размеры (ДхШ) — 12х12 мм. Интерфейсный разъем тип RJ14 — 1 шт. Интерфейс 1-wire TTL — 1 шт. Штыревой интерфейсный разъем — 1 шт. Количество линий штыревого интерфейсного разъема — 6 шт. Имеются цифровые и аналоговые порты. Имеется встроенный вычислительный микроконтроллер. Тактовая частота микроконтроллера — 16 МГц. Объем памяти, доступной по шине данных микроконтроллера — 8 КБайт. Нижняя граница диапазона допустимого напряжения питания — 5 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Размеры (ДхШ) — 40х26 мм. - Модуль светодиода, 3 шт
Размеры светодиода (ДхШ) — 3,5х2,8 мм. Интерфейсный разъем тип RJ14 — 1 шт. Интерфейс 1-wire TTL — 1 шт. Штыревой интерфейсный разъем — 1 шт. Количество линий штыревого интерфейсного разъема — 6 шт. Имеются цифровые и аналоговые порты. Имеется встроенный вычислительный микроконтроллер. Тактовая частота микроконтроллера — 16 МГц. Объем памяти, доступной по шине данных микроконтроллера — 8 КБайт. Нижняя граница диапазона допустимого напряжения питания — 5 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Размеры модуля (ДхШ) — 40х26 мм. - Модуль концевого прерывателя, 3 шт
Интерфейсный разъем тип RJ14 — 1 шт. Интерфейс 1-wire TTL — 1 шт. Штыревой интерфейсный разъем — 1 шт. Количество линий штыревого интерфейсного разъема — 6 шт. Имеются цифровые и аналоговые порты. Имеется встроенный вычислительный микроконтроллер. Тактовая частота микроконтроллера — 16 МГц. Объем памяти, доступной по шине данных микроконтроллера — 8 КБайт. Нижняя граница диапазона допустимого напряжения питания — 5 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Размеры (ДхШ) — 40х26 мм. - Модуль датчика цвета, 1 шт.
Количество цветовых каналов — 3 шт. Интерфейсный разъем тип RJ14 — 1 шт. Интерфейс 1-wire TTL — 1 шт. Штыревой интерфейсный разъем — 1 шт. Количество линий штыревого интерфейсного разъема — 6 шт. Имеются цифровые и аналоговые порты. Имеется встроенный вычислительный микроконтроллер. Тактовая частота микроконтроллера — 16 МГц. Объем памяти, доступной по шине данных микроконтроллера — 8 КБайт. Нижняя граница диапазона допустимого напряжения питания — 5 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Размеры (ДхШ) — 40х26 мм. - Модуль RGB светодиода, 3 шт.
Количество цветовых каналов — 3 шт. Интерфейсный разъем тип RJ14 — 1 шт. Интерфейс 1-wire TTL — 1 шт. Штыревой интерфейсный разъем — 1 шт. Количество линий штыревого интерфейсного разъема — 6 шт. Имеются цифровые и аналоговые порты. Имеется встроенный вычислительный микроконтроллер. Тактовая частота микроконтроллера — 16 МГц. Объем памяти, доступной по шине данных микроконтроллера — 8 КБайт. Нижняя граница диапазона допустимого напряжения питания — 5 В. Верхняя граница диапазона допустимого напряжения питания — 12 В. Размеры (ДхШ) — 40х26 мм. - Программное обеспечение для визуализации 3D моделей манипуляционного робота
Программное обеспечение обеспечивает трехмерную визуализацию модели манипуляционного робота (с угловой, плоскопараллельной и дельта-кинематикой) в процессе работы, обеспечивать построение пространственной траектории движения исполнительного механизма манипуляционного робота, возможность задания последовательности точек для прохождения через них исполнительного механизма манипуляционного робота. Программное обеспечение функционирует, как в отдельности в виде среды моделирования, так и в режиме мониторинга в реальном времени при подключении модели манипулятора посредством робототехнического контроллера. Программное обеспечение обеспечивает возможность построения графиков заданных и текущих обобщенных координат манипуляционного робота, графиков значений скоростей и ускорения, графиков расчетных значений нагрузки. Программное обеспечение позволяет задавать последовательность передвижений манипулятора посредством набора команд в блочно-графическом интерфейсе. - Учебное пособие на русском языке, 2 шт
В состав набора входит учебный комплект, включающий в себя учебное пособие, набор библиотек трехмерных элементов для прототипирования моделей манипуляционных роботов, а также программное обеспечение для работы с набором. Учебное пособие содержит материалы по разработке трехмерных моделей мобильных роботов, манипуляционных роботов с различными типами кинематики (угловая кинематика, плоско-параллельная кинематика, дельта-кинематика, SCARA (рычажная кинематика), платформа Стюарта), инструкции по проектированию роботов, инструкции и методики осуществления инженерных расчетов при проектировании (расчеты нагрузки и моментов, расчет мощности приводов, расчет параметров кинематики), инструкции по разработке систем управления и программного обеспечения для управления роботами, инструкции и методики по разработке систем управления с элементами искусственного интеллекта и машинного обучения.
На начальном этапе учащиеся могут разрабатывать модели роботов и программировать их с использованием блочно-графической среды программирования.
На среднем этапе учащиеся могут программировать модели роботов с использованием среды программирования Arduino IDE, используя отечественный робототехнический контроллер.
В рамках начального и среднего этапа учащиеся могут применять аддитивные технологии в процессе разработки и изготовления конструкции робота. Начиная с начального этапа, учащиеся могут также разрабатывать модели автономных роботов с использованием различных сенсорных устройств, в том числе систем технического зрения на базе отечественного модуля.
В рамках старшего этапа учащиеся могут расширить функционал программируемого контроллера за счет установки модуля расширения на базе микрокомпьютера с ОС Linux. Благодаря этому появляется возможность изучать основы разработки робототехнических систем с системами управления на базе ОС реального времени или типа Linux, а также изучать методы сбора и анализа визуальной информации, принципы дистанционного управления и интеграции робототехнических комплексов в системы типа Индустрия 4.0 и Интернет Вещей.
-
Main page
-
Applied Robotics
«СТЕМ Мастерская» Экспертный набор. Инструкция по сборке манипулятора с угловой кинематикой.
Образовательный набор для изучения многокомпонентных робототехнических систем и манипуляционных роботов «Образовательный робототехнический комплект «СТЕМ Мастерская». Расширенный» предназначен для изучения основ разработки и конструирования моделей промышленных манипуляционных роботов различного типа и автономных мобильных роботов. В состав комплекта входят сервомодули, представляющие собой модели промышленных автоматизированных приводов со встроенной системой управления. Применение данного типа сервомодулей позволяет разрабатывать модели манипуляционных роботов с различными типами кинематической схемы, обладающих высокой точностью и динамикой движения.
Ссылка на набор: https://robotgeeks.ru/collection/cust…
Ссылка на пример из видео: https://github.com/AppliedRobotics/ST…
On this page of the site you can watch the video online «СТЕМ Мастерская» Экспертный набор. Инструкция по сборке манипулятора с угловой кинематикой. with a duration of hours minute second in good quality, which was uploaded by the user Applied Robotics 29 June 2023, share the link with friends and acquaintances, this video has already been watched 1,142 times on youtube and it was liked by 9 viewers. Enjoy your viewing!
Смотреть ещё
5 734 курса
Рабочие листы
к вашим урокам
Скачать
Описание презентации по отдельным слайдам:
-
1 слайд
Роботы-манипуляторы на базе набора СТЕМ мастерской
Выполнил: ученик — 9 го класса
Дьячковский Роман
Руководитель: учитель информатики
Слепцов Игорь Михайлович
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ САХА (ЯКУТИЯ)
НАУЧНО-ПРАКТИЧЕСКАЯ КОНФЕРЕНЦИЯ “ШАГ В БУДУЩЕЕ”
МБОУ «АРЫЛАХСКАЯ СРЕДНЯЯ ОБЩЕОБРАЗОВАТЕЛЬНАЯ ШКОЛА»
МО «ВЕРХОЯНСКИЙ РАЙОН» РС(Я) -
2 слайд
Актуальность: роботы-манипуляторы весьма востребованы во многих отраслях науки и техники. Они позволяют работать в опасных средах, таких как космос или глубина океана, обезопасить и автоматизировать производство. Попытаемся построить своего робота-манипулятора, а также рассмотрим их типы, функции и возможности.
Цели: Построить своего робота-манипулятора.
Задачи:
Изучить расширенный робототехнический набор «СТЕМ мастерская»;
Изучить процесс строительства робота-манипулятора; -
3 слайд
Роботы-манипуляторы
Робот-манипулятор – это вид роботов для управления пространственным положением орудий, объектов труда и конструкционных узлов и элементов.
Видов таких роботов весьма много. Среди них обычно выделяют разделение роботов: по мобильности (возможности движения), по назначению (области применения), по типу управления. -
4 слайд
СТЕМ Мастерская
В комплект расширенного робототехнического набора СТЕМ Мастерская входит: 3 робота-манипулятора для сборки, сервоприводы, пневмомодуль, электронно-вычислительные устройства и периферийные устройства, а также литература. -
5 слайд
Этапы строительства робота-манипулятора
В учебном пособии рекомендуют следующую инструкцию по строительству:
Сборка манипулятора
Сборка манипулятора
Сборка ЭВМ
Расчеты
Грузоподъемность
Прямая задача кинематики
Обратная задача кинематики
Программирование
Написание программы
Проверка и отладка -
6 слайд
Планирование
СТЕМ мастерская предлагает на выбор 3 манипулятора c разными кинематиками:С угловой С плоско параллельной Delta
-
7 слайд
Планирование
Для строительства предлагается три робота – с угловой, с плоско-параллельной и Delta-кинематикой. После тщательного изучения был выбран манипулятор с плоско-параллельной кинематикой. По сравнению с остальными манипуляторами у него не сильно перегружены сервоприводы у основания, а также достаточно большая рабочая область. -
8 слайд
1 этап — сборка
На первом этапе происходит первоначальная настройка и сборка манипулятора.
При сборке важно быть очень внимательными – детали очень мелкие и их легко потерять. -
9 слайд
1 этап — сборка
Для надежности и устойчивости конструкции его необходимо закрепить
Далее собираем электронно-вычислительную машину. Платы ЭВМ очень чувствительны к статическому электричеству – соблюдаем осторожность -
10 слайд
2 этап — расчеты
В этом этапе требуется определить массу, которую сможет поднимать манипулятор, а также решить прямую и обратную задачи кинематики (необходимо знание основ тригонометрии). -
11 слайд
3 этап — программирование
Программирование производится на программе Arduino, который поддерживает три языка Си, С++ и Java. Совместно с руководителем, мы задали программу перемещения кубиков из одного положения в другое. -
12 слайд
Прямая задача кинематики
Заключается в определении положения схвата относительно основания, зная положение каждого сервопривода. -
13 слайд
Обратная задача кинематики
Смысл этой задачи противоположна прямой задаче. Есть объект с известным положением в пространстве. Необходимо найти положение каждого привода для захвата этого объекта. -
14 слайд
Перспектива
Для усовершенствования данного манипулятора возможно использование технологии технического зрения, которая идет в комплекте с набором СТЕМ.
Возможно, также получится прикрепить вместо захвата что-то другое. Например, ручку, мел, фрезерный станок, сварочный аппарат и т.д. -
15 слайд
Заключение
Построенный робот-манипулятор позволил воочию увидеть сложности его строительства – начиная от деталей конструкции до программных не состыковок. Но перспективы дальнейшего развития толкают дальнейшее изучение данного направления. Расширенный робототехнический набор СТЕМ даёт для этого множество возможностей. При помощи этого набора возможно создание не только манипулятора, который делает только то что написано, но и манипулятора который «видит» что он делает. -
16 слайд
Литература
СТЕМ Мастерская. Часть 1 / учебное пособие, ООО «Прикладная робототехника» — 2020;
СТЕМ Мастерская. Часть 2 / учебное пособие, ООО «Прикладная робототехника» — 2020;
Официальный сайт компании Arduino https://arduino.ru/
Электронные учебные пособия и инструкции сайта Applied Robotics https://appliedrobotics.ru/?page_id=670
Найдите материал к любому уроку, указав свой предмет (категорию), класс, учебник и тему:
7 287 187 материалов в базе
- Выберите категорию:
- Выберите учебник и тему
- Выберите класс:
-
Тип материала:
-
Все материалы
-
Статьи
-
Научные работы
-
Видеоуроки
-
Презентации
-
Конспекты
-
Тесты
-
Рабочие программы
-
Другие методич. материалы
-
Найти материалы
Другие материалы
- 02.10.2024
- 28
- 0
- 02.10.2024
- 844
- 20
- 02.10.2024
- 117
- 2
- 02.10.2024
- 432
- 25
- 02.10.2024
- 68
- 0
- 02.10.2024
- 79
- 0
- 02.10.2024
- 77
- 0
- 02.10.2024
- 97
- 1
Вам будут интересны эти курсы:
-
Курс повышения квалификации «Введение в сетевые технологии»
-
Курс повышения квалификации «Информационная этика и право»
-
Курс повышения квалификации «История и философия науки в условиях реализации ФГОС ВО»
-
Курс повышения квалификации «Маркетинг в организации как средство привлечения новых клиентов»
-
Курс повышения квалификации «Методика написания учебной и научно-исследовательской работы в школе (доклад, реферат, эссе, статья) в процессе реализации метапредметных задач ФГОС ОО»
-
Курс повышения квалификации «Методы и инструменты современного моделирования»
-
Курс повышения квалификации «Основы управления проектами в условиях реализации ФГОС»
-
Курс повышения квалификации «Применение MS Word, Excel в финансовых расчетах»
-
Курс повышения квалификации «Формирование компетенций межкультурной коммуникации в условиях реализации ФГОС»
-
Курс повышения квалификации «Экономика предприятия: оценка эффективности деятельности»
-
Курс профессиональной переподготовки «Метрология, стандартизация и сертификация»
-
Курс профессиональной переподготовки «Теория и методика музейного дела и охраны исторических памятников»

🔥 Похожие видео
Обзор комплекта СТЕМ Мастерская РасширенныйСкачать

Комплект «СТЕМ Мастерская Расширенный»Работа в среде Motorcortex.Часть 1.Скачать

Обзор набора Applied Robotics — «Стем Мастерская: Расширенный набор»Скачать

Применение набора СТЕМ мастерская для реализации конкурсного задания по компетенции «Интернет вещей»Скачать

«СТЕМ Мастерская» Экспертный набор. Инструкция по сборке манипулятора с DELTA-кинематикой.Скачать

Комплект «СТЕМ Мастерская Расширенный». Сетевое управление манипулятором.Скачать

📸 Дополнительные видео
Обзор комплекта «СТЕМ Мастерская». Экспертный набор.Скачать

Комплект «СТЕМ Мастерская Расширенный». Работа с контроллером OpenCM. Часть 1.Скачать

Комплект «СТЕМ Мастерская Расширенный»Работа в среде Motorcortex.Часть 3.Скачать

«СТЕМ Мастерская» Экспертный набор. Инструкция по сборке манипулятора с ПП-кинематикой.Скачать

«СТЕМ Мастерская» Экспертный набор. Инструкция по сборке манипулятора с угловой кинематикой.Скачать

Комплект «СТЕМ Мастерская Расширенный»Работа в среде Motorcortex.Часть 2.Скачать

робототехника конструктор по точке ростаСкачать

Обзор набора «Конструктор программируемых моделей инженерных систем».Скачать

Вебинар «Конструктор программируемых моделей инженерных систем» ч.1Скачать

манипулятор с угловой кинематикойСкачать

Обзор набора Конструктор программируемых моделей инженерных системСкачать
